We invite you to submit the title and a short abstract of your work, should you wish to present your research at the symposium, no later than March 31st, 2022. To register, please fill out the registration form.
Guidelines for Poster Submission
For the DCL poster design, please feel free to choose any template/design available on the internet or provided by MS PowerPoint or even create your own poster design.
Please upload your poster to the google drive folder if you will present at the symposium. The deadline for the poster submission is April 10th, 2022.
Additionally, please print your poster and present it at the poster session in LOVE Manufacturing Building (MRDC II) hallway. The LOVE building will be available for poster set-up beginning at 10:00 am on Thursday. The poster session is scheduled to begin at 10:30 am.
The Media Lab in Library offers students and staff large format gloss printing. Here is the link to submit a poster for printing in Media Lab. The cost is
18″ x 24″ poster: $4.50
24″ x 36″ poster: $9.00
We will be providing easels, form boards (30×40), and clips.
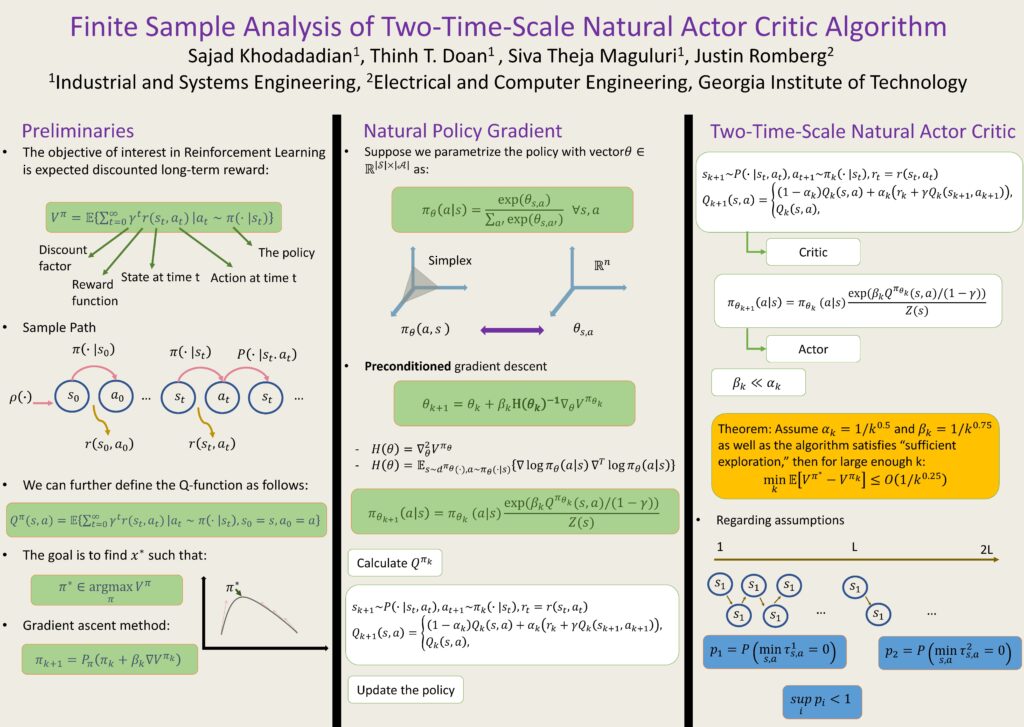
We provide a poster example below for your reference:
April 14, 2022 2:30 pm – 3:30 pm, Plenary talk 2 for DCL Student Symposium 2022
Location: 4211 Conference room, MRDC building
Craig Woolsey
Professor
Virginia Tech
Abstract
Model-based control design for ocean and atmospheric vehicles typically starts with a linear approximation of the system dynamics. And for good reason. A control system based on a linearized dynamic model outperforms alternatives when the linear model is accurate — that is, for small perturbations from a nominal state. Control system performance degrades with the approximation, however. In scenarios where the small perturbation model is inappropriate, one must consider nonlinear modeling and control. Examples from the speaker’s experience include a small surface craft tracking a desired trajectory with variable speed and course, a submerged vessel maneuvering near the surface in waves, biomimetic vehicles that vary their shape for propulsion and control in water or in air, and a fixed-wing aircraft that maneuvers aggressively through the atmosphere. In considering these examples, a unifying theme will emerge: using the (nonlinear) mechanical system structure of the governing equations to obtain provably effective control strategies.
Biography
Craig Woolsey a Professor in Virginia Tech’s Kevin T. Crofton Department of Aerospace and Ocean Engineering (AOE). The principal aim of Prof. Woolsey’s research is to improve performance and robustness of autonomous vehicles, particularly ocean and atmospheric vehicles. Woolsey is a past recipient of the NSF Career Award and the ONR Young Investigator Program Award and recently served on the National Academies Committee to Assess the Risks of Unmanned Aircraft Systems (UAS) Integration. Woolsey is vice-chair (and chair-elect) of the AIAA Atmospheric Flight Mechanics Technical Committee (TC) and an active member of the IEEE TC on Manufacturing, Robotics, and Automation and the IFAC TC on Marine Systems. Prof. Woolsey teaches courses in ocean and atmospheric vehicle dynamics and in linear and nonlinear control. With AOE colleagues Mazen Farhood and Cornel Sultan, Woolsey co-directs the Nonlinear Systems Laboratory (http://www.nsl.aoe.vt.edu/). With his colleague Kevin Kochersberger, Prof. Woolsey also co-directs the Virginia Tech site within the Center for Unmanned Aircraft Systems (https://c-uas.org/), an NSF Industry/University Cooperative Research Center.
April 14, 2022 1:00 pm – 2:00 pm, Plenary talk 1 for DCL Student Symposium 2022
Location: 4211 Conference room, MRDC building
Ufuk Topcu
Associate Professor
The University of Texas at Austin
Abstract
Autonomous systems are emerging as a driving technology for countlessly many applications. Numerous disciplines tackle the challenges toward making these systems trustworthy, adaptable, user-friendly, and economical. On the other hand, the existing disciplinary boundaries delay and possibly even obstruct progress. I argue that the nonconventional problems that arise in designing and verifying autonomous systems require hybrid solutions at the intersection of learning, formal methods, and controls. I will present examples of such hybrid solutions in the context of learning in sequential decision-making processes: physics-informed neural networks for the modeling of unknown dynamical systems and joint task inference and reinforcement learning. These results offer novel means for effectively integrating physics-based, contextual, or structural prior knowledge into data-driven learning algorithms. They improve data efficiency by several orders of magnitude and generalizability to environments and tasks that the system had not experienced previously.
Biography
Ufuk Topcu is an Associate Professor in the Department of Aerospace Engineering and Engineering Mechanics at The University of Texas at Austin, where he holds the W. A. “Tex” Moncrief, Jr. Professorship in Computational Engineering and Sciences I. He is a core faculty member at the Oden Institute for Computational Engineering and Sciences and Texas Robotics and the director of the Autonomous Systems Group. Ufuk obtained his Doctor of Philosophy degree from the University of California, Berkeley in 2008. Prior to joining The University of Texas at Austin, he was with the Department of Electrical and Systems Engineering at the University of Pennsylvania. He was a postdoctoral scholar at the California Institute of Technology until 2012. Ufuk’s research focuses on the theoretical and algorithmic aspects of the design and verification of autonomous systems, typically in the intersection of formal methods, reinforcement learning, and control theory. He takes a relatively broad view on autonomy and tends to tackle abstract problems motivated by challenges cutting across multiple applications of autonomy. His research contributions have been recognized by the NSF CAREER Award, the Air Force Young Investigator Award, the IEEE CSS Antonio Ruberti Young Researcher Prize, and Oden Institute Distinguished Researcher Award. He is a member of the Computing Community Consortium Council.
The 2021 Georgia Tech Decision and Control Laboratory (DCL) Student Symposium was held virtually during April 15th-16th. In spite of the virtual format, all sessions enjoyed lively participation and interaction.
In addition, a special event “Students’ Farewell Brunch with Magnus” was held for students to express their gratitude for Dr. Magnus Egerstedt, and what he represents to the graduate research community in robotics and controls at Georgia Tech.
We are very grateful to the support and guidance from Decision and Control Laboratory (DCL) and Georgia Tech. Due to the hard work of the student organizing committee and participation of graduate students in DCL, the student symposium was successful in spite of the COVID situation.
Plenary Talk 3 given by Dr. Dawn TilburySpecial Event for Dr. Magnus EgerstedtVirtual Interactions
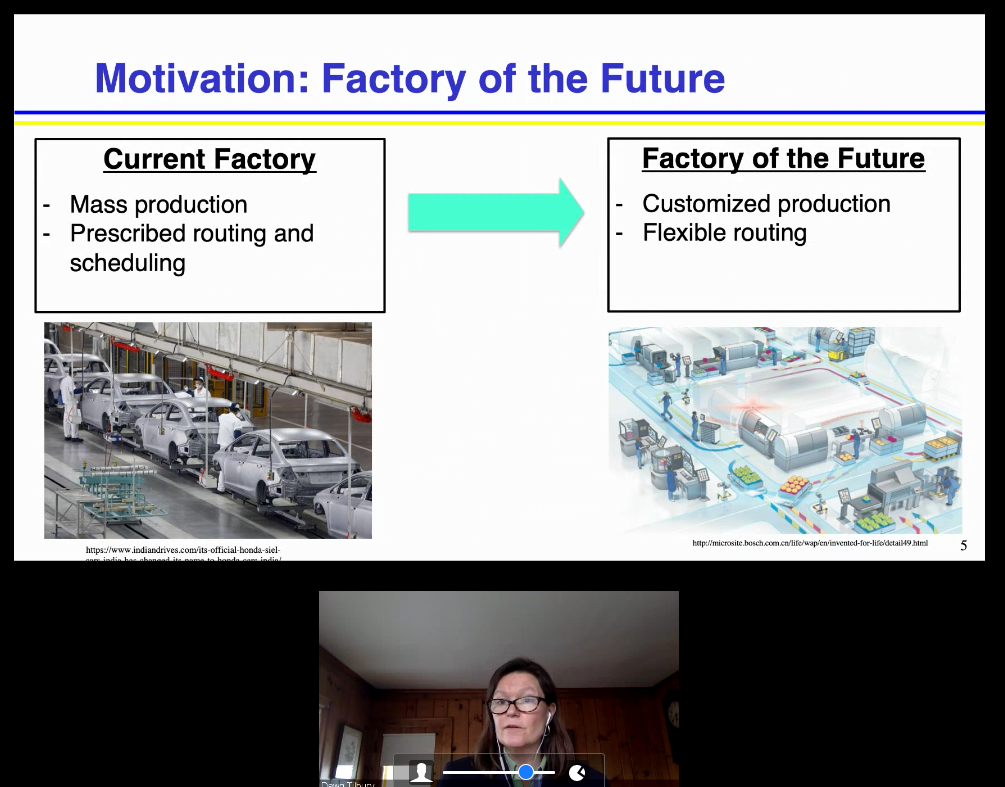
Many manufacturing systems today have been optimized for mass production, making the same products over and over again with high quality and low cost. There is an increased demand for customized or even personalized production, which can be possible while utilizing many of the same machines currently existing on plant floors. However, the control systems must be completely redefined. The Internet of Things and networked control systems are key enabling technologies to realize this vision.
Decentralized control strategies, specifically agent-based control, can be used to enable customized and personalized production, while improving the flexibility and responsiveness of manufacturing systems. A manufacturing plant floor has both resource agents, representing the processing and material handling resources available, as well as product agents, representing the parts that traverse through the factory, being transformed from raw materials to finished products. Agents each have their own goals, and make decisions based on these goals, their communications with each other, and information available from the physical system. This presentation will cover our recent work on product agents, and discuss how this decentralized approach can lead to improved productivity. Implementation on a small-scale automated testbed will be presented.
Biography
Dr. Dawn M. Tilbury received the B.S. degree in Electrical Engineering, summa cum laude, from the University of Minnesota in 1989, and the M.S. and Ph.D. degrees in Electrical Engineering and Computer Sciences from the University of California, Berkeley, in 1992 and 1994, respectively. In 1995, she joined the faculty of the University of Michigan, Ann Arbor, where she is currently Professor of Mechanical Engineering with a joint appointment in Electrical Engineering and Computer Science. Her research interests lie broadly in the area of control systems, including applications to robotics and manufacturing systems. She has published more than 150 articles in refereed journals and conference proceedings. She was elected Fellow of the IEEE in 2008 and Fellow of the ASME in 2012, and is a Life Member of SWE. Since June of 2017, she has been the Assistant Director for Engineering at the National Science Foundation.
We live in an increasingly electrified world. For stationary applications such as industry and manufacturing, this statement has been obvious since the start of the 20th century as steam and belt drives in factories gradually gave way to electric motors for machining, conveyor lines, and all manner of other industrial applications. For domestic stationary applications, modern conveniences blossomed as electrification grew starting in the middle of the 20th century. Lighting, air-conditioning, cooking and cleaning, as well as many types of in-home entertainment were fueled by growing abilities to provide relatively cheap electrical power over long distances.
Now, a fifth of the way through the 21st century, we are seeing electrification rise in the mobile domain. The progress has been steady for several decades but it is really during the past several years that electrified mobility has seen a rapid growth at the level of individual consumer. Interestingly, this growth cuts across widely varying modes of mobility; from individual bicycles to on-highway vehicles to large ships and aircraft.
This talk will detail some of the trends in mobility domains and will discuss some of the technical challenges. For mobility systems, the power density is a key metric of performance that dictates viability of technology for use in the transport of goods and people. Of high relevance to Decision and Control audience that cross-cuts departments, we will discuss the interplay between modes of power distribution within electrified mobility systems. This includes the flow of power in the mechanical, electrical, and thermal domains. Several examples of challenges will be raised along with some solutions and open questions across the broad spectrum of Mechanical Engineering fields. In particular, we will demonstrate examples where the integration of different fields, in a systems-level approach, can afford significant advantages in power density.
Biography
Dr. Andrew G. Alleyne (F’17) received the B.S.E. degree from Princeton University, Princeton, NJ, USA, in 1989, and the M.S. and Ph.D. degrees from the University of California at Berkeley, Berkeley, CA, USA, in 1992 and 1994, respectively. He held visiting professorships at TU Delft, Delft, The Netherlands, the University of Colorado, Boulder, CO, USA, ETH Zu?rich, Zu?rich, Switzerland, and Johannes Kepler University, Linz, Austria. He is currently the Ralph and Catherine Fisher Professor with the University of Illinois at Urbana–Champaign, Urbana, IL, USA, and the Director of the NSF ERC on Power Optimization for Electro-Thermal Systems (POETS). He works the modeling, simulation, and control of nonlinear mechanical systems. His academic record includes supervision of over 80 M.S. and Ph.D. students and over 400 conferences and journal publications. Dr. Alleyne is a fellow of American Society for Mechanical Engineers (ASME). He serves on the Scientific Advisory Board of the U.S. Air Force and the National Academies Board on Army Research and Development. Recognitions include the IEEE CSS Distinguished Lecturer, a Fulbright, the Gustus Larson Award, the Charles Stark Draper Award, and the Henry Paynter Outstanding Investigator Award.
In robot navigation tasks, such as UAV highway traffic monitoring, it is important for a mobile robot to follow a prescribed desired path. However, most of the existing path following navigation algorithms cannot guarantee global convergence to desired paths or enable following self-intersected desired paths due to the existence of singular points, where navigation algorithms return unreliable or even no solutions. In this talk, I show how to deal with this issue when using vector-field guided path-following (VF-PF). Conventional VF-PF algorithms generate a vector field of the same dimension as that of the space where the desired path lives. By contrast, we propose a novel method to transform self-intersected or simple closed desired paths to non-self-intersected and unbounded (precisely, homeomorphic to the real line) counterparts in a higher-dimensional space; correspondingly, we construct a singularity-free guiding vector field in a higher-dimensional space. I will also show the results of our outdoor experiments with a fixed-wing airplane in a windy environment to follow both 2D and 3D desired paths.
Biography
Dr. Ming Cao has since 2016 been a professor of networks and robotics with the Engineering and Technology Institute (ENTEG) at the University of Groningen, the Netherlands, where he started as an assistant professor in 2008. He received the Bachelor degree in 1999 and the Master degree in 2002 from Tsinghua University, Beijing, China, and the Ph.D. degree in 2007 from Yale University, New Haven, CT, USA, all in Electrical Engineering. From September 2007 to August 2008, he was a Postdoctoral Research Associate with the Department of Mechanical and Aerospace Engineering at Princeton University, Princeton, NJ, USA. He worked as a research intern during the summer of 2006 with the Mathematical Sciences Department at the IBM T. J. Watson Research Center, NY, USA. He is the 2017 and inaugural recipient of the Manfred Thoma medal from the International Federation of Automatic Control (IFAC) and the 2016 recipient of the European Control Award sponsored by the European Control Association (EUCA). He is a Senior Editor for Systems and Control Letters, an Associate Editor for IEEE Transactions on Automatic Control, and was an associate editor for IEEE Transactions on Circuits and Systems and IEEE Circuits and Systems Magazine. He is a member of the IFAC Conference Board and a vice chair of the IFAC Technical Committee on Large-Scale Complex Systems. His research interests include autonomous agents and multi-agent systems, complex networks and decision-making processes.
For the DCL poster design, please feel free to choose any template/design available on the internet or provided by MS PowerPoint or even create your own poster design. Due to Covid-19, the DCL 2021 Symposium will be held virtually on “SpatialChat” online platform.
Consequently, participants must adhere to the poster font and dimension specification listed below to ensure the legibility of the posters on the Spatial Chat platform. Smaller font sizes that sufficed in physical poster presentation settings will appear as too small on Spatial Chat. You can find two poster examples below, “Physical Poster” and “Virtual Poster”. The first one was designed to be presented in a physical presentation setting while the second was designed for virtual presentation setting. Those poster examples give the reader an idea of how the font size and dimensionality aspects of the poster affects the readability and visibility of the poster when presented on an online virtual platform. Finally, please find attached a poster template file, ‘posterTmp.ppt,’ that participant could use.
Poster design specifications:
Poster size: A0 (Landscape) 118.9 cm (width) by 84.1 cm (height).
Title font-size: 100.
Section headings font-size: 70.
Paragraph text font-size: 45.
Images and figures are preferred to be in vector graphics format to avoid pixilation.
Final poster file must in an image format, e.g., JPG or SVG. However, export your poster as .SVG to avoid pixilation.
Along with the poster, a pre-recorded video presentation explaining the work submitted in the poster is required. The presentation slides should not be merely a single slide showing the submitted poster. Below is some requirement and instructions on submitting your video.
Video file requirements:
Recommended video length for regular and invited presentations: 2 minutes
Maximum video length for regular and invited presentations: 3 minutes
File size limit for regular/invited/tutorial presentations: 100MB
File format: MP4
Minimum height: 480 pixels
Video aspect ratio: 16:9
Presentation slides are required to be no more 5 slides and to submitted as a PDF along with the video
Recording instructions:
A recommended tool for effective recording is using the Zoom platform. Create a meeting where the speaker is the only participant, share the screen (presentation slides) and activate the presenter camera and record. Please refer to the following link for further instructions on Zoom recording.
Make sure that you record the whole screen to avoid having trouble with the aspect ratio of your recording.
It is highly recommended that the presenter’s face is also recorded in the video. However, by doing so, make sure that the video inset is not hiding important parts of your slides.
Use suitable software to ensure that the video size is below 100MB and has the right format (MP4). For example, “Handbrake” is an open-source video transcoder for converting video to MP4 and for file compression. The default settings typically reduce the size of Zoom-generated videos by a factor of three.